ESP32 เป็นบอร์ดไมโครคอนโทรลเลอร์ที่ใช้ IoT ซึ่งสามารถใช้เพื่อเชื่อมต่อ ควบคุม และอ่านเซ็นเซอร์ต่างๆ PIR หรือเซ็นเซอร์จับการเคลื่อนไหวเป็นหนึ่งในอุปกรณ์ที่เราสามารถเชื่อมต่อกับ ESP32 เพื่อตรวจจับการเคลื่อนไหวของวัตถุในช่วงของเซ็นเซอร์ตรวจจับการเคลื่อนไหวโดยใช้ ESP32
ก่อนที่เราจะเริ่มเชื่อมต่อ ESP32 กับเซ็นเซอร์ PIR เราต้องรู้ว่าการขัดจังหวะทำงานอย่างไร และวิธีอ่านและจัดการกับการขัดจังหวะใน ESP32 ต่อไปเราต้องเข้าใจแนวคิดหลักของฟังก์ชัน delay() และ millis() ในการเขียนโปรแกรม ESP32
เรามาพูดถึงการทำงานของ PIR กับ ESP32 โดยละเอียดกัน
นี่คือเนื้อหาสำหรับบทความนี้:
1: การขัดจังหวะคืออะไร
เหตุการณ์ส่วนใหญ่ที่เกิดขึ้นในการเขียนโปรแกรม ESP32 ทำงานตามลำดับซึ่งหมายถึงการดำเนินการโค้ดทีละบรรทัด เพื่อจัดการและควบคุมเหตุการณ์ที่ไม่จำเป็นต้องรันระหว่างการรันโค้ดตามลำดับ ขัดจังหวะ ถูกนำมาใช้
ตัวอย่างเช่น หากเราต้องการดำเนินการบางอย่างเมื่อมีเหตุการณ์พิเศษเกิดขึ้น หรือมีการส่งสัญญาณทริกเกอร์ไปยังพินดิจิทัลของไมโครคอนโทรลเลอร์ เราจะใช้การขัดจังหวะ
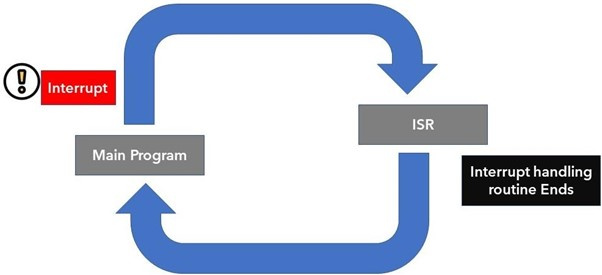
ด้วยการขัดจังหวะ เราไม่จำเป็นต้องตรวจสอบสถานะดิจิทัลของขาอินพุต ESP32 อย่างต่อเนื่อง เมื่อเกิดการขัดจังหวะ โปรเซสเซอร์จะหยุดการทำงานของโปรแกรมหลักและจะมีการเรียกใช้ฟังก์ชันใหม่ซึ่งเรียกว่า ISR ( กิจวัตรบริการขัดจังหวะ ). นี้ ISR ฟังก์ชันจัดการการขัดจังหวะที่เกิดขึ้นหลังจากนั้นกลับไปที่โปรแกรมหลักและเริ่มดำเนินการ ตัวอย่างหนึ่งของ ISR คือ PIR เซ็นเซอร์ตรวจจับความเคลื่อนไหว ที่ สร้างการขัดจังหวะเมื่อตรวจพบการเคลื่อนไหว .
1.1: ขัดจังหวะพินใน ESP32
การขัดจังหวะภายนอกหรือฮาร์ดแวร์อาจเกิดจากโมดูลฮาร์ดแวร์ใดๆ เช่น เซ็นเซอร์สัมผัสหรือปุ่มกด การขัดจังหวะการสัมผัสเกิดขึ้นเมื่อตรวจพบการสัมผัสที่พิน ESP32 หรือสามารถใช้การขัดจังหวะ GPIO เมื่อกดปุ่มหรือปุ่มกด
ในบทความนี้ เราจะเรียกใช้การขัดจังหวะเมื่อตรวจพบการเคลื่อนไหวโดยใช้เซ็นเซอร์ PIR กับ ESP32
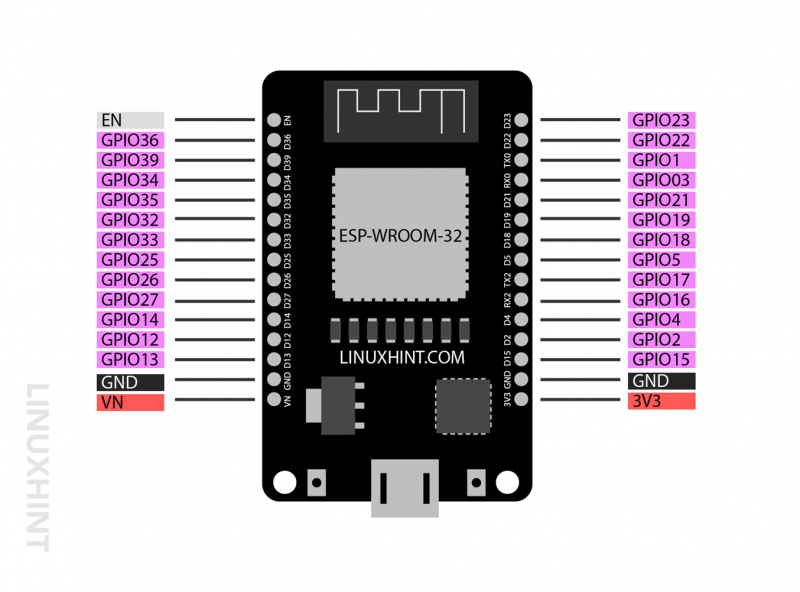
พิน GPIO เกือบทั้งหมดยกเว้น 6 พินรวม SPI ซึ่งมักจะมาใน 36 - รุ่นพินของบอร์ด ESP32 ไม่สามารถใช้เพื่อวัตถุประสงค์ในการโทรขัดจังหวะได้ ดังนั้น ในการรับอินเตอร์รัปต์จากภายนอก ต่อไปนี้คือพินที่เน้นด้วยสีม่วงซึ่งสามารถใช้ใน ESP32:
ภาพนี้เป็นของ ESP32 แบบ 30 พิน
1.2: การเรียก Interrupt ใน ESP32
สำหรับการใช้งานอินเตอร์รัปต์ใน ESP32 เราสามารถเรียก แนบอินเตอร์รัปต์ () การทำงาน.
ฟังก์ชันนี้ยอมรับอาร์กิวเมนต์สามตัวต่อไปนี้:
-
- พิน GPIO
- ฟังก์ชันที่จะดำเนินการ
- โหมด
1: GPIO pin เป็นอาร์กิวเมนต์แรกที่เรียกว่าภายใน แนบอินเตอร์รัปต์ () การทำงาน. ตัวอย่างเช่น หากต้องการใช้พินดิจิทัล 12 เป็นแหล่งอินเทอร์รัปต์ เราสามารถเรียกใช้ได้ digitalPinToInterrupt(12) การทำงาน.
2: ฟังก์ชั่น ที่จะดำเนินการคือโปรแกรมที่ดำเนินการทุกครั้งที่มีการขัดจังหวะหรือถูกกระตุ้นโดยแหล่งภายนอกหรือภายใน อาจเป็นได้ทั้งไฟ LED กะพริบหรือเปิดสัญญาณเตือนไฟไหม้
3: โหมด เป็นอาร์กิวเมนต์ที่สามและสุดท้ายที่ฟังก์ชันขัดจังหวะต้องการ มันอธิบายเวลาที่จะทริกเกอร์การขัดจังหวะ สามารถใช้โหมดต่อไปนี้ได้:
-
- ต่ำ: ทริกเกอร์การขัดจังหวะทุกครั้งที่พิน GPIO ที่กำหนดไว้ต่ำ
- สูง: ทริกเกอร์การขัดจังหวะทุกครั้งที่พิน GPIO ที่กำหนดไว้สูง
- เปลี่ยน: ทริกเกอร์อินเตอร์รัปต์ทุกครั้งที่พิน GPIO เปลี่ยนค่าจากสูงไปต่ำหรือกลับกัน
- ตก: เป็นโหมดที่จะทริกเกอร์การขัดจังหวะเมื่อพินบางตัวเริ่มตกจากสถานะสูงไปต่ำ
- เพิ่มขึ้น: เป็นโหมดที่จะทริกเกอร์การขัดจังหวะเมื่อพินบางตัวเริ่มเพิ่มขึ้นจากสถานะต่ำไปสูง
วันนี้เราจะใช้ เพิ่มขึ้น โหมดเป็นอาร์กิวเมนต์ที่สามสำหรับฟังก์ชันขัดจังหวะ เมื่อใดก็ตามที่เซ็นเซอร์ PIR ตรวจพบการขัดจังหวะ LED หรือเซ็นเซอร์จะสว่างขึ้นเนื่องจากเปลี่ยนจากสถานะต่ำเป็นสูง
2: ตัวจับเวลาในการเขียนโปรแกรม ESP32
ตัวจับเวลาในการเขียนโปรแกรมไมโครคอนโทรลเลอร์มีบทบาทสำคัญในการดำเนินการคำสั่งสำหรับช่วงเวลาเฉพาะของตัวจับเวลาหรือในช่วงเวลาเฉพาะ
ฟังก์ชันหลักสองหน้าที่มักใช้เรียกเอาต์พุตคือ ล่าช้า() และ มิลลิวินาที () . ความแตกต่างระหว่างทั้งสองอย่างคือ ฟังก์ชัน delay() จะหยุดโปรแกรมที่เหลือเมื่อเริ่มดำเนินการ ในขณะที่ millis() ทำงานตามระยะเวลาที่กำหนด จากนั้นโปรแกรมจะกลับไปที่ฟังก์ชันหลัก
ในที่นี้เราจะใช้ LED กับเซ็นเซอร์ PIR และเราไม่ต้องการให้มันเรืองแสงอย่างต่อเนื่องหลังจากเกิดการขัดจังหวะ เราจะใช้ฟังก์ชัน millis() ที่ช่วยให้เราเรืองแสงตามเวลาที่กำหนด แล้วกลับไปที่โปรแกรมเดิมอีกครั้งเมื่อการประทับเวลาผ่านไป
2.1: ฟังก์ชันหน่วงเวลา ()
ฟังก์ชัน delay() ค่อนข้างง่าย ใช้เพียงหนึ่งอาร์กิวเมนต์ซึ่งก็คือ นางสาว ของชนิดข้อมูลขนาดยาวที่ไม่ได้ลงนาม อาร์กิวเมนต์นี้แสดงเวลาเป็นมิลลิวินาทีที่เราต้องการหยุดโปรแกรมชั่วคราวจนกว่าจะเลื่อนไปยังบรรทัดถัดไป
ตัวอย่างเช่น ฟังก์ชันต่อไปนี้จะหยุดโปรแกรมเป็นเวลา 1 วินาที .
ล่าช้า ( 1,000 )
การหน่วงเวลา () เป็นฟังก์ชันการปิดกั้นชนิดหนึ่งสำหรับการเขียนโปรแกรมไมโครคอนโทรลเลอร์ ล่าช้า () บล็อกส่วนที่เหลือของรหัสเพื่อดำเนินการจนกว่าเวลาของฟังก์ชันนี้จะไม่สมบูรณ์ หากเราต้องการดำเนินการหลายคำสั่ง เราควรหลีกเลี่ยงการใช้ฟังก์ชันหน่วงเวลาแทน เราสามารถใช้โมดูล RTC มิลลิวินาทีหรือตัวจับเวลาภายนอก
2.2: มิลลิวินาที () ฟังก์ชัน
ฟังก์ชัน millis() ส่งกลับจำนวนมิลลิวินาทีที่ผ่านไปตั้งแต่บอร์ด ESP32 เริ่มรันโปรแกรมปัจจุบัน การเขียนโค้ดไม่กี่บรรทัดทำให้เราสามารถคำนวณเวลาปัจจุบันได้อย่างง่ายดาย ไม่ว่าในกรณีใดขณะรันโค้ด ESP32
มิลลิวินาทีถูกใช้อย่างแพร่หลายเมื่อเราต้องทำงานหลายอย่างโดยไม่ปิดกั้นโค้ดที่เหลือ นี่คือไวยากรณ์ของฟังก์ชันมิลลิวินาทีที่ใช้สำหรับคำนวณระยะเวลาที่ผ่านไป เพื่อให้เราสามารถดำเนินการตามคำสั่งเฉพาะได้
ถ้า ( มิลลิปัจจุบัน - มิลลิก่อนหน้า > = ช่วงเวลา ) {มิลลิก่อนหน้า = มิลลิปัจจุบัน;
}
รหัสนี้จะลบมิลลิวินาทีก่อนหน้า () จากมิลลิวินาทีปัจจุบัน () หากเวลาที่ลบออกเท่ากับเพื่อกำหนดช่วงเวลาที่คำสั่งเฉพาะจะถูกดำเนินการ สมมติว่าเราต้องการให้ LED กะพริบเป็นเวลา 10 วินาที หลังจากทุกๆ 5 นาที เราสามารถกำหนดช่วงเวลาเท่ากับ 5 นาที (300000ms) โค้ดจะตรวจสอบช่วงเวลาทุกครั้งที่โค้ดทำงาน เมื่อถึงแล้ว ไฟ LED จะกะพริบเป็นเวลา 10 วินาที
บันทึก: เราจะใช้ฟังก์ชัน millis() เพื่อเชื่อมต่อ ESP32 กับเซ็นเซอร์ PIR เหตุผลหลักที่อยู่เบื้องหลังการใช้หน่วยมิลลิและไม่หน่วงเวลาคือฟังก์ชัน millis() ไม่บล็อกโค้ดเหมือนที่ฟังก์ชัน delay() ทำ ดังนั้นเมื่อ PIR ตรวจจับการเคลื่อนไหวได้ ก็จะเกิดการขัดจังหวะขึ้น การใช้ฟังก์ชันขัดจังหวะ millis() จะเรียก LED ตามเวลาที่กำหนด หลังจากนั้น หากหยุดการเคลื่อนไหว ฟังก์ชัน millis() จะรีเซ็ตและรอการขัดจังหวะถัดไป
ในกรณีที่เราใช้ฟังก์ชัน delay() มันจะบล็อคโค้ดทั้งหมดและการขัดจังหวะใดๆ ที่เกิดขึ้นจะไม่ถูกอ่านโดย ESP32 ส่งผลให้โปรเจ็กต์ล้มเหลว
3: การเชื่อมต่อเซ็นเซอร์ PIR กับ ESP32
ที่นี่เราจะใช้ฟังก์ชัน millis() ในโค้ด Arduino IDE เนื่องจากเราต้องการเรียกใช้ LED ทุกครั้งที่เซ็นเซอร์ PIR ตรวจจับการเคลื่อนไหวบางอย่าง ไฟ LED นี้จะติดสว่างเป็นเวลาหนึ่ง หลังจากนั้นจะกลับสู่สภาวะปกติ
นี่คือรายการส่วนประกอบที่เราต้องการ:
-
- บอร์ดพัฒนา ESP32
- เซ็นเซอร์ตรวจจับความเคลื่อนไหว PIR (HC-SR501)
- นำ
- ตัวต้านทาน 330 โอห์ม
- สายเชื่อมต่อ
- เขียงหั่นขนม
แผนผัง สำหรับเซ็นเซอร์ PIR ที่มี ESP32:
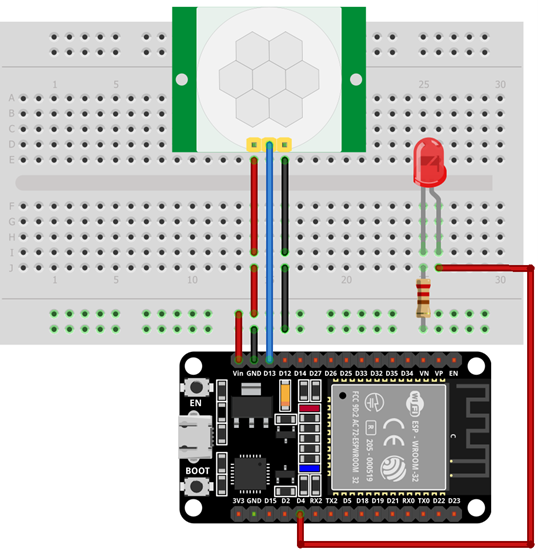
การเชื่อมต่อพินของ ESP32 กับเซ็นเซอร์ PIR คือ:
| ESP32 | เซ็นเซอร์ PIR |
| มา | วีซีซี |
| GPIO13 | ออก |
| จีเอ็นดี | จีเอ็นดี |
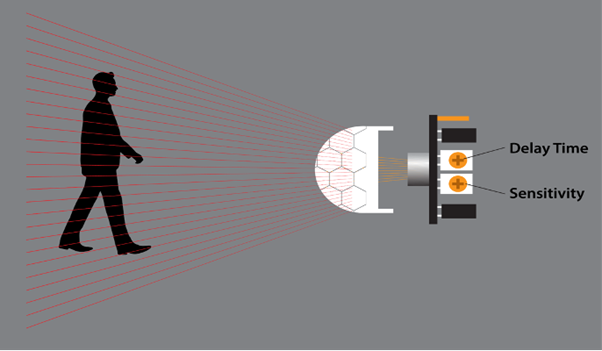
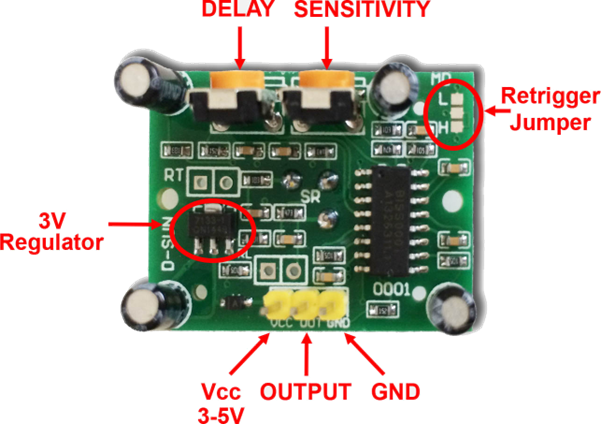
3.1: เซนเซอร์จับความเคลื่อนไหว PIR (HC-SR501)
PIR เป็นตัวย่อของ เซ็นเซอร์อินฟราเรดแบบพาสซีฟ . มันใช้เซ็นเซอร์ไพโรอิเล็กทริกคู่หนึ่งซึ่งตรวจจับความร้อนรอบๆ ตัวมัน เซ็นเซอร์ไพโรอิเล็กทริกทั้งสองนี้วางเรียงต่อกัน และเมื่อวัตถุเข้ามาในระยะของวัตถุ การเปลี่ยนแปลงของพลังงานความร้อนหรือความแตกต่างของสัญญาณระหว่างเซ็นเซอร์ทั้งสองนี้จะทำให้เอาต์พุตเซ็นเซอร์ PIR มีค่าต่ำ เมื่อขาออก PIR ไปที่ LOW เราสามารถตั้งค่าคำสั่งเฉพาะเพื่อดำเนินการได้
ต่อไปนี้เป็นลักษณะของเซ็นเซอร์ PIR:
-
- สามารถตั้งค่าความไวขึ้นอยู่กับตำแหน่งของโปรเจ็กต์ (เช่น การตรวจจับเมาส์หรือการเคลื่อนไหวของใบไม้)
- เซ็นเซอร์ PIR สามารถตั้งค่าระยะเวลาที่ตรวจจับวัตถุได้
- ใช้กันอย่างแพร่หลายในสัญญาณเตือนความปลอดภัยภายในบ้านและแอปพลิเคชันตรวจจับการเคลื่อนไหวตามความร้อนอื่นๆ
3.2: พินเอาท์ HC-SR501
PIR HC-SR501 มาพร้อมกับสามพิน สองอันคือพินพลังงานสำหรับ Vcc และ GND และอีกอันคือพินเอาต์พุตสำหรับสัญญาณทริกเกอร์
ต่อไปนี้เป็นคำอธิบายของพินเซ็นเซอร์ PIR:
| เข็มหมุด | ชื่อ | คำอธิบาย |
| 1 | วีซีซี | ขาอินพุตสำหรับเซ็นเซอร์ เชื่อมต่อกับ ESP32 Vin Pin |
| สอง | ออก | เอาต์พุตเซ็นเซอร์ |
| 3 | จีเอ็นดี | เซ็นเซอร์ GND |
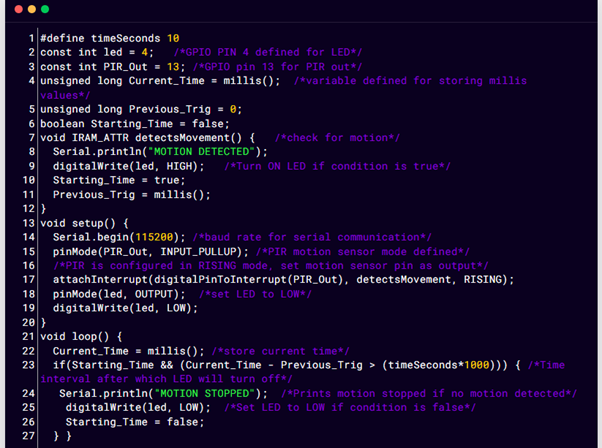
3.3: รหัส
ตอนนี้ถึงโปรแกรม ESP32 ให้เขียนโค้ดที่กำหนดในโปรแกรมแก้ไข Arduino IDE และอัปโหลดไปยัง ESP32
#define timeSeconds 10const int นำ = 4 ; /* รหัส PIN ของ GPIO 4 กำหนดไว้ สำหรับ นำ */
Const int PIR_Out = 13 ; /* พิน GPIO 13 สำหรับ PIR ออก */
Current_Time ยาวที่ไม่ได้ลงชื่อ = มิลลิวินาที ( ) ; /* กำหนดตัวแปร สำหรับ เก็บค่ามิลลิวินาที */
ยาวที่ไม่ได้ลงนาม Previous_Trig = 0 ;
บูลีนสตาร์ท_เวลา = เท็จ ;
ถือเป็นโมฆะ IRAM_ATTR ตรวจจับการเคลื่อนไหว ( ) { /* ตรวจสอบ สำหรับ การเคลื่อนไหว */
Serial.println ( 'ตรวจจับการเคลื่อนไหว' ) ;
ดิจิตอลเขียน ( นำสูง ) ; /* เปิดไฟ LED ถ้า เงื่อนไขคือ จริง */
การเริ่มต้น_เวลา = จริง ;
Previous_Trig = มิลลิวินาที ( ) ;
}
การตั้งค่าเป็นโมฆะ ( ) {
Serial.begin ( 115200 ) ; /* อัตราบอด สำหรับ การสื่อสารแบบอนุกรม */
พินโหมด ( PIR_Out, INPUT_PULLUP ) ; /* กำหนดโหมดเซ็นเซอร์ตรวจจับการเคลื่อนไหว PIR */
/* PIR ได้รับการกำหนดค่า ใน โหมด RISING, ชุด ขาเซ็นเซอร์การเคลื่อนไหว เช่น เอาต์พุต */
แนบการขัดจังหวะ ( digitalPinToInterrupt ( PIR_ออก ) , ตรวจจับความเคลื่อนไหว , RISING ) ;
พินโหมด ( นำ, เอาท์พุท ) ; /* ชุด LED เป็นต่ำ */
ดิจิตอลเขียน ( นำ, ต่ำ ) ;
}
วนเป็นโมฆะ ( ) {
Current_Time = มิลลิวินาที ( ) ; /* เก็บปัจจุบัน เวลา */
ถ้า ( การเริ่มต้น_เวลา && ( Current_Time - Previous_Trig > ( เวลา วินาที * 1,000 ) ) ) { /* ช่วงเวลาหลังจากนั้น ที่ LED จะดับลง */
Serial.println ( 'หยุดการเคลื่อนไหว' ) ; /* หยุดการเคลื่อนไหวการพิมพ์ ถ้า ไม่พบการเคลื่อนไหว */
ดิจิตอลเขียน ( นำต่ำ ) ; /* ตั้งค่า LED เป็น LOW ถ้า เงื่อนไขคือ เท็จ */
การเริ่มต้น_เวลา = เท็จ ;
}
}
รหัสเริ่มต้นด้วยการกำหนดพิน GPIO สำหรับเอาต์พุต LED และ PIR ต่อไป เราสร้างตัวแปรที่แตกต่างกันสามตัวที่จะช่วยในการเปิด LED เมื่อตรวจพบการเคลื่อนไหว
ตัวแปรทั้งสามนี้คือ Current_Time, Previous_Trig, และ การเริ่มต้น_เวลา ตัวแปรเหล่านี้จะจัดเก็บเวลาปัจจุบัน เวลาที่ตรวจพบการเคลื่อนไหว และตัวจับเวลาหลังจากตรวจพบการเคลื่อนไหว
ในส่วนการตั้งค่าก่อนอื่น เราได้กำหนดอัตราบอดแบบอนุกรมสำหรับการสื่อสาร ใช้ต่อไป โหมดพิน () ตั้งเซ็นเซอร์ตรวจจับการเคลื่อนไหว PIR เป็น INPUT PULLUP เพื่อตั้งค่าการขัดจังหวะ PIR แนบอินเตอร์รัปต์ () มีการอธิบาย GPIO 13 ได้รับการอธิบายเพื่อตรวจจับการเคลื่อนไหวในโหมด RISING
ถัดไปในส่วน loop() ของโค้ด โดยใช้ฟังก์ชัน millis() เราเปิดและปิด LED เมื่อทริกเกอร์สำเร็จ
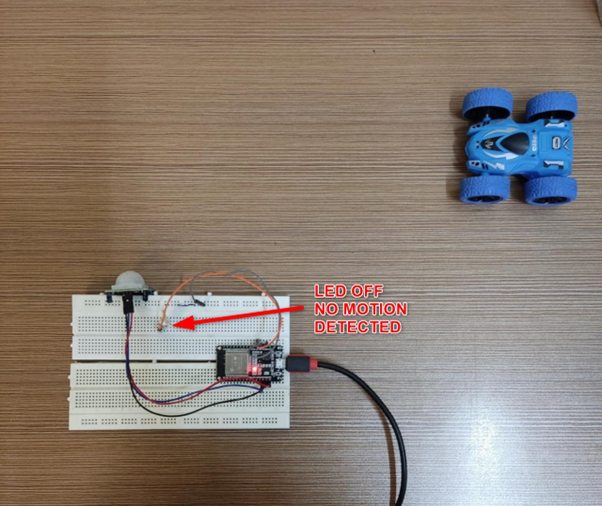
3.4: เอาต์พุต
ในส่วนเอาต์พุต เราจะเห็นว่าวัตถุอยู่นอกระยะของเซ็นเซอร์ PIR ดังนั้น นำ หัน ปิด .
ตอนนี้ การเคลื่อนไหวที่ตรวจพบโดย LED เซ็นเซอร์ PIR จะเปลี่ยนไป บน สำหรับ 10 วินาที หลังจากนั้นหากตรวจไม่พบการเคลื่อนไหวก็จะยังคงอยู่ ปิด จนกว่าจะได้รับทริกเกอร์ถัดไป
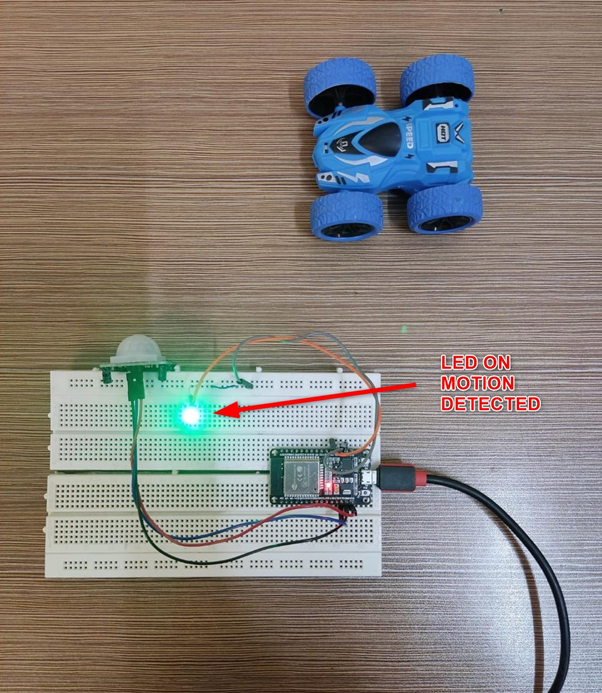
เอาต์พุตต่อไปนี้แสดงโดยจอภาพอนุกรมใน Arduino IDE
บทสรุป
เซ็นเซอร์ PIR ที่มี ESP32 สามารถช่วยตรวจจับการเคลื่อนไหวของวัตถุที่ผ่านระยะได้ การใช้ฟังก์ชันขัดจังหวะในการเขียนโปรแกรม ESP32 เราสามารถทริกเกอร์การตอบสนองที่พิน GPIO บางตัว เมื่อตรวจพบการเปลี่ยนแปลง ฟังก์ชันอินเตอร์รัปต์จะทำงานและไฟ LED จะเปิดขึ้น